
SAVED: How Drones Could Protect U.S. Navy Ships from Mines
The future is here.
This testing has continued—and even accelerated—under the new PMS-406 Program Manager, Captain Pete Small, who noted during the 2019 Navy League of the United States SeaAirSpace Symposium that, “We will bring in Navy program of record weapons systems to incorporate into commercially-derived modular craft.” He also explained how industry is challenged to design scaled-up versions of current USVs, but that this scaling-up initiative is one that is increasingly important to the Navy.9
However, the devil is in the details about how the U.S. Navy intends to bring new technologies to the warfighter. One example from our Navy experience suggests that we must pursue a thoughtful approach to inserting technological solutions to meet Fleet and Fleet Marine Force requirements, rather than depend on promising—but as-yet-unproven—technologies.
From Concept to Technology Adoption: Often a Bridge Too Far
Far too often the technological promise of a concept is so compelling that a solution is rushed to the Fleet with profoundly disastrous results. There is no better example to make this case than an unmanned system the U.S. Navy built and fielded decades ago, the QH-50 DASH (Drone Anti-Submarine Helicopter).
As the United States became involved in the Vietnam War during the early 1960s, the Navy renewed its efforts to find a way to field unmanned systems to meet urgent operational needs. At that time, all sea-based aviation was concentrated on the decks of Navy aircraft carriers and large-deck amphibious assault ships. Surface combatants—cruisers, destroyers and frigates—had no air assets at their disposal.
The solution was to adapt a technology that had been in development since the late 1950s and field the QH-50 DASH (Drone Anti-Submarine Helicopter). In April 1958, the U.S. Navy awarded Gyrodyne Company a contract to modify its RON-1 Rotorcycle, a small twin coaxial rotors helicopter, to explore its use as a remote-controlled drone capable of operating from the decks of small ships. By 1963 the Navy approved large-scale production of the QH-60C, with the ultimate goal of putting these DASH units on all its 240 FRAM-I and FRAM-II destroyers.
In January 1965 the Navy began to use the QH-50D as a reconnaissance and surveillance vehicle in Vietnam. Equipped with a real-time TV camera, a film camera, a transponder for better radar tracking, and a telemetry feedback link to inform the remote-control operator of drone responses to his commands, the QH-50D began to fly “SNOOPY” missions from destroyers off the Vietnamese coast. The purpose of these missions was to provide over-the-horizon target data to the destroyer’s five-inch batteries. Additionally, DASH was outfitted with ASW torpedoes to deal with the rapidly growing Soviet submarine menace, the idea being that DASH would attack the submarine with homing torpedoes or depth charges at a distance that exceeded the range of a submarine’s torpedoes.
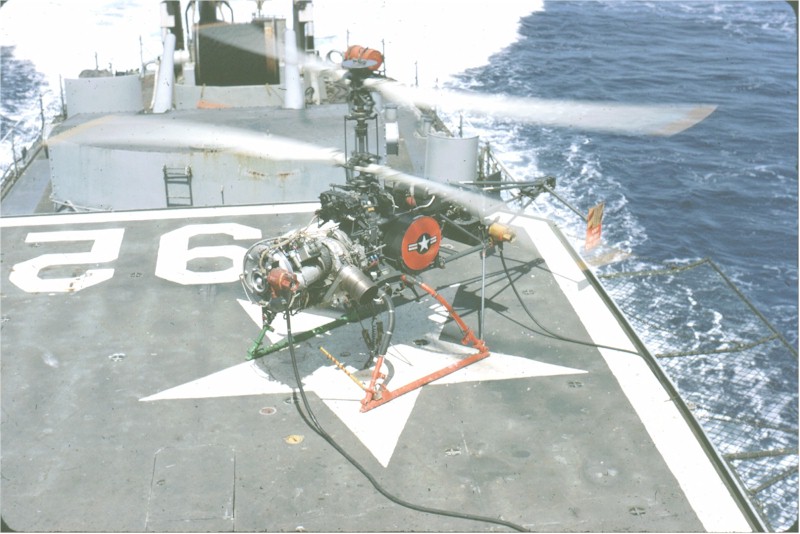
By 1970 however, DASH operations had ceased fleet-wide. Although DASH was a sound concept, the Achilles heel of the system was the electronic remote-control system. The lack of feedback loop from the drone to the controller accounted for almost 80 percent of all drone losses. While apocryphal to the point to being a bit of an urban legend, it was often said the most common call on the Navy Fleet’s 1MC general announcing systems during the DASH-era was, “DASH Officer, Bridge,” when the unfortunate officer controlling the DASH was called to account for why “his” system had failed to return to the ship and crashed into the water. Compared to technologies used to control unmanned systems today, that of the 50s to early 70s was primitive at best. In many cases, what was attempted with drones was, literally, a bridge too far.
Leading the Mine Warfare Renaissance with Tested and Proven Technologies
While the challenges of the Navy’s DASH systems are one example, we have witnessed other cases where technologies were inserted as solutions to Fleet or Fleet Marine Forces’ needs, only to fail—often spectacularly—to live up to the promise their developers hoped for. That is why we believe the U.S. Navy would be well-served to leverage—and combine—technologies that have been examined by commercial and other government agencies, and tested extensively in Navy exercises, experiments, and demonstrations to field a near-term MCM capability.
Over the past several years, in a series of Navy and Marine Corps (and other Service) events as diverse as the Ship-to-Shore Maneuver Exploration and Experimentation and Advanced Naval Technology Exercise (S2ME2 ANTX), the Battlespace Preparation in a Contested Environment, the Surface Warfare Distributed Lethality in the Littoral demonstration, the Citadel Protect Homeland Security Exercise, Dawn Blitz, Steel Knight, Military Ocean Terminal Concept Demonstration (MOTS CD), the Bold Alligator exercise series, and Valiant Shield, operators have field-tested a diverse number of emerging technologies.
Technologies proven in these, as well as other events, were the MANTAS Unmanned Surface Vehicle (USV), the Mine Neutralization System Remote Operated Vehicle (MNS ROV), and a suite of sensors developed and fielded by Teledyne Technologies Incorporated. We believe that the serial development of the MANTAS USV and MNS ROV, enabled by Teledyne sensors can provide an MCM capability for the U.S. Navy and Marine Corps today at low cost and with minimal technical risk.
Given the compelling need to creatively apply new, innovative technologies to address the operational and tactical challenges posed by mines, as well as the need to expand the use of unmanned systems to tackle MCM challenges, the ability to meet this need with commercial-off-the-shelf hardware and software—and not wager on emerging technologies that will take years to develop, mature and field—should be a priority for Navy and Marine Corps planners.
From Concept to Capability: What Would Such a System Look Like?
We hasten to emphasize that the components of this system-of-systems are not based on just concepts or drawings or early-stage prototypes. Rather, every component has been in the water and tested in the operational environment. The basic elements of our proposal are based on a multi-modal, multi-domain, modular approach and include several platforms.
As the hub of a best-in-class autonomous COTS MCM capability, the Navy should consider a scaled-up version of the T12 (twelve-foot) MANTAS high-speed catamaran proven in the exercises, experiments and demonstrations listed above. This T38 is similar in size to an eleven-meter RHIB carried by many U.S. Navy ships and thus can be easily integrated aboard most U.S. Navy warships. In comparison to an 11m RHIB, the T38 is 2 feet longer, 5 inches wider, drafts 17 inches shallower at max displacement, and boasts a cross-section height over 8 feet lower, making it extraordinarily hard to detect. The maximum displacement of the T38 is 40 percent lower than an 11m RHIB, while capacity for mission module sensors and systems is 25 percent higher; it carries more and is easier to handle. The T38 can operate in up to sea state five, has a cruise speed equal to, and a maximum speed twice that of an 11m RHIB, and a range four times that of the 11m RHIB. The T38 has an aft-mounted tow station for a mine-hunting sonar system and mine neutralization ROVs, and a submerged aft-hull well-deck configuration for simple autonomous launch and recovery of subsystems. The T38 can be fitted with a wide variety of sensors such as SeaBat F and T (series) sonars, X-Band Radar, Navigation Radar, SeaFLIR 230 Gyro Stabilized Hi-Res Camera, M400 Gyro stabilized EO/Thermal Camera, AIS and LIDAR Collision Avoidance system—among others—providing it with the ability to be closely controlled by a remote operator or operated autonomously.
The MANTAS features a suite of integrated sensors controlled by an Integrated Common Control Architecture housed in an installed or mobile control console. This unified design provides communications management, automated target recognition, and data management and processing. There are two primary MCM subsystems carried aboard the MANTAS.
The first is a tow-body mounted Synthetic Aperture Sonar (SAS) designed to search for mine-like objects (MLOs). This in-production COTS system can survey 3.5 km2/hr at a resolution sufficient for MLO classification. The system is programmable for bottom following, terrain referencing, and obstacle avoidance. As data comes aboard the USV, Automatic Target Recognition (ATR) will identify likely MLO anomalies, which will then be presented in near-real-time to the man–on-the-loop for verification as an MLO. Verified MLOs will be added as a waypoint for validation, while invalid MLOs will be discarded or passed to the navigation database as a hazard to navigation. Verified MLOs will be continuously updated to a recommended route for the Mine Neutralization System (MNS) Remotely Operated Vehicle (ROV). This route can be influenced by the watch team for various priorities such as route efficiency, most-valid to least-valid MLOs, or other operational considerations. After the area search is complete, the T38 will immediately transition from hunting to neutralizing by conducting a stern submerged well-deck recovery of the tow-body and launch of the tethered MNS ROV. This capability is a key feature in achieving Single Sortie Detect-to-Engage (SSDTE).